Annular Further – Switzerland – Timber and wood architecture, engineering, materials science

Photo – Institute of Structural Engineering (Timber Structures)
University and other state funded research – II
You will find overviews here of the three principal centres for Swiss timber research: Department of Architecture, Wood and Civil Engineering, Biel (AHB), EPFL Lausanne’s Laboratory of Timber Construction Ibois, and ETH Zurich’s Structural Engineering – Timber Structures.
There is a further section overviewing timber related research at other Swiss institutes.
You can go directly to the research overviews at these institutes and universities, etc. sections, directly here or from the beginning of their main pages.
Department of Architecture, Wood and Civil Engineering, University of Berne (AHB)
École polytechnique fédérale de Lausanne
(EPFL)
Swiss Federal Institute of Technology in Zurich
(ETH Zurich)
The Department of Architecture, Wood and Civil Engineering

The main AHB building (designed by Meili & Peter Partner Arkitekten) – Photo AHB/BFH

[Left] – In one of the IWH’s lab’s – Photo IWH/AHB [Right] – The Structural engineering lab within the IdBH – Photo IdBH/AHB

Introduction
The Department of Architecture, Wood and Civil Engineering
Departement Architecture, bois, génie civil (AHB) University of Bern – Bienne/Biel campus.
AHB, within the University of Bern and with a campus in the French/German language border town of Biel/Bienne, is the major university department in Switzerland specialising in wood as a building material in architecture and engineering. The department is divided into five Institutes and Centre’s, four of which integrate wood and timber into their research and teaching activities. The institutes are:
Institute for Timber Construction, Structures and Architecture (ITHA)
With overlapping expertise in structural and timber engineering, load bearing systems, building physics, fire safety, conservation, and preservation. ITHA also includes access to technical testing labs.
The Institute for Materials and Wood Technology (IWH)
Focuses on materials science and wood chemistry, and specifically materials emissions research in construction, multi-layered materials, and indoor air quality. The institute includes a broad range of relevant infrastructure and technologies in their material emissions lab.
The Institute for Digital Construction, Structures and Architecture (IdBH)
Directly involved in digital manufacture and digital construction, alongside resource management and market research, the IbDH is equipped with robots, CNC processing tech, additive manufacturing, and other digital technologies.
The Center for Development and Cooperation
Focused on research and development projects which reflect its collaborations with other AHB departments, including materials, structures, and the built environment. Research includes tropical woods and work on new materials made from sustainable local resources.
Higher Technical School of Wood Biel
Höhere Fachschule Holz Biel – affiliated with the AHB, Wood Biel offers higher technical school and vocational training at undergrad and post-graduate levels.

Photo AHB/BFH

Render of the planned new campus – Render image Pool Arkitekten
Overview of activities and research
The department is involved in a broad, primarily applied research programme, both in Switzerland and with European universities, as well as research institutes and the wood industry sector. A new head of department, Professor Peter Staub, was appointed in early 2021. There is a considerable applied research programme, including the Holz & Wald 4.0 Initiative, hardwood R&D, primarily beech based engineered timber materials, and Timber Structures 3.0 technologies, (or TS3), a start-up in the testing stages of extra-large dimensioned timber floor slabs. The company behind TS3, Timbatec, are ex-AHB graduates, and alumni are helping shape this new Swiss wave of timber engineering.
Proholzschweiz – website run by and for former students of the wood school.
New campus – AHB is also part of plans that were advancing prior to Coronavirus for a new campus. The status of the project is presently uncertain, although designs have been released by Zurich practice, Pool Arkitekten, after winning a limited competition in 2015.
Fribourg Smart Living Lab – A new research centre designed by Stuttgart studio Benisch Arkitekten and Drees & Sommer Schweiz AG, and ZPF Ingenieure AG, is underway as part of the blueFactory Innovation District, Fribourg. The project will Use Fagus Suisse native engineered beech, and will include research projects led by the AHB.
Wald und Holz 4.0 Initiative (website in German/French) – ran from 2017 to 2020 and was led by the BFH’s ABH, the Wald & Holz 4.0 Initiative aims to support Swiss timber companies in introducing and integrating 4.0 digital tech into their working practices and the sector.
With 60 wood related companies, a spectrum of inter-connected projects, including Workshop of the Future, Smart Factory Lab, and what is described as a first ‘lighthouse’ project pioneering digital networking of biological and technical production. Eleven prototype smart apps have so far been developed, including the Internet of Things’ intelligent labels; individual chips for every piece of material, alongside a collaborative in-house data-exchange, and collaborative Building Information Software (BIM) enabling all parts of the process of the timber journey from forest stand to factory product to be worked on within customised integrated software.
The Swiss Smart Factory (in German) – a planned lighthouse project, part of the new BFH Biel campus plan.
The Wald & Holz 4.0 Initiative ran from 2017 to 2020.
Research projects:
Timber Structures 3.0 – Research on extra-large dimensioned flat load bearing wooden elements for flooring and ceiling of up to 8m by 8m in collaboration with Timbatec, ETH-Z, Schilliger, and Henkel Purbond glues. Initial research period 2009-2014, followed by commercial start-up TS3 AG in 2015, and a subsequent further research programme (in German) including construction of test bench pavilion, between 2017 to 2020.
TS3.0 research paper:
TS3 – A New Technology for Efficient Timber Structures, Franke, S. and Zollig, S. Current Trends in Civil & Structural Engineering (CTCSE) 2020.

The AHB and Timbertec TS3 test pavilion – Photo AHB/BFH
Butt-joint bonding of technology for point-supported biaxial load-bearing flat slabs made of cross-laminated timber. Zollig, S, Muster, M., Themessl, A., Research presentation paper (2019).
Fagus Suisse – Swiss Beech – ongoing research at AHB for over the last ten years. The research is now coming to fruition with a number of commercial projects. Recent research includes:
IWH research – supporting Fagus Suisse development of a variant of glue laminated beech materials and products. Research included the development of digital quality control process for beech glulam. The resulting beech glulam is high strength with up to GL60 grading. New automated production has also improved pressing times at Fagus Suisse’s – Les Breuleux manufacturing facility in the Jura.
European beech (Fagus sylvatica L.) glued laminated timber: lamination strength grading, production and mechanical properties – Ehrhart, T. Steiger, R. Lehmann, M; Frangi, A. European Journal of Wood and Wood Products, 78(5), 2020. One of the more recent papers in the decade long research work into beech and other hardwoods at AHB (in collaboration with Empa and the ETH-Z Structural Timber Dept, out of which Fagus Suisse have been set up, and the suite of Neue Holzbau hardwood materials and projects have built upon and introduced into live projects.
Further – see current Annular Unstructured for pieces on AHB et al’s development of beech hardwood.
Further hardwood links:
Useful Innova research presentation reporting the state of European hardwood research, including IWH’s professor Frédéric Pichelin on glulam beech here.
Research overview presentation on beech hardwood by professor Thomas Rohner here.
Increasing the lifespan of wooden bridges (no found research papers) –development of new wooden structural elements using liquid synthetic sealants with the objective of increasing length of durability and usability.

Walser Houses in Upper Valais – Photo IHTA/AHB
Research proceedings from the COST Timber Bridges Conference 2014 held at the AHB here.
Building renovation in Upper Valais – VetaNova (in German) – research into improving the conservation and repair processes of historic timber-framed buildings in the Valais canton. Working with carpentry, architectural and local municipality planning, this two-year (2019 – 2020) project has made the renovation processes more efficient and reliable.
Deep Wood – BIM related research into collaborative design with Timbatec and Lucerne University of Applied Sciences. The objective is to develop and test in real time, cross company collaborative planning. Research includes testing on a new residential apartment block in Thun, which serves as a Living Lab for the research.
Bio based related research – investigating how forest biomass extracts can be used to replace oil-based compounds, with potential uses including low emission adhesives for the wood sector and fire-resistant resins, which can be turned into composite materials. Working with Schilliger, a pilot plant has been installed within the AHB’s IWH.
For a list of all AHB published research see here.
AHB’s annual report for 2020 is here.
EPFL - (École polytechnique fédérale de Lausanne)
Navigate to the sub-sections here:
Introduction
Laboratory of Timber Construction Ibois
School of Architecture, Civil and Environmental Engineering – ENAC
Civil engineering Institute – CII
Environmental Engineering Institute – IIE
Institute of Architecture – (IA)
Arch section prototype of the double-curved shell structure for the live Annen HQ project currently on site – Photo – Ibois
Introductory overview
EPFL in Lausanne, in the Vaud canton of the southwestern French part of Switzerland is the sister Federal Institute to ETH Zurich. While a sizeable research university EPFL’s focus on material technologies contrasts with that at ETHZ. Within the School of Architecture, Civil and Environmental Engineering, there are a small number of institutes, departments, and laboratories where a timber dimension is integrated to a greater or lesser extent.
The key research unit within EPFL is Ibois, the Laboratory for Timber Constructions, within the Civil Engineering Institute (IIC) – see in depth below. Beyond Ibois, other research and teaching programmes within the School of Architecture, Civil and Environmental Engineering (Faculté de l’environnement naturel, architectural et construit – ENAC),which include wood related work are:

Annen HQ under construction October 2020 – Photo Valentin Bianchi
Laboratory for Timber Constructions – Ibois
Ibois (the Laboratory for Timber Constructions) – has been known as a centre for timber research, initially under the influential German timber engineer, Professor Julius Natterer,
Further see Fourth Door Review 7
But since 2012, led by Professor Yves Weinand, who has guided Ibois ever deeper into the interface terrain between lightweight timber structural engineering and construction and digital tech, including robotics. Ibois has continued and developed its research focus, which encompasses lightweight shell structures, plate structures, wood-to-wood connections, manufactured timber, and integrated mechanical joints, which taken together has supported the emergence of a series of projects applying plate and shell-based wood panel systems.
The laboratory continues to participate in live research projects which have over the last decade resulted in two buildings; the Chapel of St Loup, completed in 2009, and 2017’s Vidy Théâtre Timber Pavilion in Lausanne
Further see guest research paper on the Vidy Théâtre in Unstructured extra 8 here.
Ibois’ current projects are the Annen Head office (on site) and the Mobic Robotic Hall, each of which involve much research within the laboratory.
Annen Head office – designed by Valentiny hvp architects with Bureau d’Études Weinand (also the structural engineers), and Annen Plus SA, a Luxembourg timber construction company. This new HQ (on site since 2017) is made up of 23 double-curved shell vaults between 22 and 53 m in breadth and 6 to 9 m width. These shell vault plates overlap and are joined by through-tenon joints – see research below – creating a 5800 m2 space for offices and prefabrication workshops.
A prototype double curved shell section spanning 7.1 m, and with 1.75 m width and 2 m height was completed in 2016, followed by a 1:2 scale single glue-less arch prototype spanning 12.5 m each, subsequently used for testing and research.

Demonstration of a test double-layered timber plate shell – Photo Ibois

Forest render still from video featured in Petras Vestartas’ research – see first research project below
A core research output included:
A Double-Layered Timber Plate Shell – Computational Methods for Assembly, Prefabrication, and Structural Design. Robeller, C., Weinand, Y., Konavic, M., Dedijer, M., and Pauly, M. 2016.
A shortened version can be found in the CLT futures edition of Unstructured extra 8.
Current research:
Woodworking Joints and Assembly Methods for Locally Sawn Solid Timber Elements in Free-form Structures – investigation into natural tree forms’ adaptability and usage as non-standard timber members. Petras Vestartas’ PhD research includes creating a library of trees’ natural characteristics through 3D laser scanning technology, along with physical prototypes using an industrial robot arm. The research aims at developing a Joinery Solver for pair-wise elements, including 3D representation, assembly sequence, and tool-path generation.
Petras Vestartas’ own website is here.
Robotic Assembly of Integrally Attached Timber Plate Structures – PhD thesis by Nicolas Rogeau, research into automated robotic assembly of wooden joints, focused on timber plate structures from the 3D modelling through to the assembly stage. As timber plate structures are a new field in digital timber fabrication, a three-part programme has been developed, i) assembly process automation, ii) generation of robotic trajectories and fabrication toolpath, and iii) optimisation of joints geometry to ease the assembly process.
Recently completed research:
Development of Novel Standardised Structural Timber Elements using Wood-Wood Connections – completed in 2020 this PhD thesis by Julien Gamerro explored the potential for economic, digitally produced wood-to-wood connections, with a particular focus on specific technical challenges, including i) making it building sector relevant, ii) standardising construction, iii) developing a calculation model, as well as researching further wood-to-wood connections’ mechanical behaviour. One result has been digitally produced through tenon connections for folded plate structures, a tool enabling the production of 300 different plates was developed, and the through tenon connections were used with CLT panel systems for the first time, with potential for their standardisation. A link to the research thesis is here.
Mechanical Characterization of Integrally-Attached Timber Plate Structures – PhD research completed in 2020 into advancing understanding of the mechanical properties of the Integral Mechanical Attachment technique for folded plate structures by doctoral researcher, Aryan Rezaei Rad. The research considered different load combinations for integrally-attached timber plate structures, with physical experiments on through-tenon joints under tensile, edgewise, flatwise loads, and flexural movements. Given the results, numerical models (i.e. Finite Element) and continuum models require advanced expertise; a novel macroscopic model is introduced. The modular framework considerably reduces the time required for converting thousands of CAD assemblies to CAE macro models and can be used by practitioners. Link to thesis here (password access required).

Detail from the research, applying same code generation of the CAD-FEM exchange geometry to a set of arches

Part of I-Bois’ testing lab at EPFL – Photo Ibois
A Structural Design Methodology for Freeform Timber Plate Structures Using Wood-Wood Connections – 2020 research PhD by Anh Chi Nguyen developing a design methodology for timber plate structures comprising wood to wood connections and planar elements, which applies automated numerical tools in its structural analysis. Applying a finite element model to a live project, the Annen Plus SA timber company head office in Luxemburg – see above – which integrates double-layered, double-curved timber plate shells, a design framework was developed to automate the work-flow processes and other project elements. Link to the thesis here (open access) and link to further Anh Chi Nguyen papers here.
For earlier research work see here and scroll down.
Publications:
Links to all publications are here.
Links to research journal articles can be found here, to conference papers here, and to technical reports here.
Testing Laboratory Facilities:
Ibois has extensive lab testing facilities.

Advanced Active Façade – Photo LAST/EPFL

Becoming Leman ALICE research module including design and construction – Photo ALICE/EPFL
Institute of Architecture
Two of the Institute of Architecture’s five umbrella clusters include research labs with a degree of focus and engagement on timber, the Construction and Sustainable Development cluster and the Project and Design cluster.
i – Construction and Sustainable Development Cluster
The Laboratory of Architecture and Sustainable Technologies (LAST) – Laboratoire d’architecture et technologies durables – within the Construction and Sustainable Development cluster is involved in research projects which integrate timber.
Recent research from LAST
Advanced Active Façade (AAF) – self-supporting, low carbon wooden structure with interior cellulose based thermal insulation and coating, with an integrated external active photovoltaic panel system. The interdisciplinary research with the CSEM Center and H.Glass included a 1:1 prototype and a student competition for a residential project integrating the AAF into the building envelope.
The Structural Xploration Lab (SXL) – runs a spectrum of research projects focused on waste, re-use, upcycling, and the circular economy. This includes reuse and upcycling of timber.
ii – The Project and Design Cluster
Includes two laboratories with wood related design studios as part of their emphasis, EAST & ALICE.
EAST & ALICE – Both the Laboratory of Elementary Architecture and Types (EAST) and Atelier de la Conception de l’Espace – (ALICE) or (or the Design Studio on the Conception of Space) run live design workshops as part of their student research modules, invariably using timber as a core construction element.
Environmental Engineering Institute – (IIE)
Within the IIE the Plant Ecology Research Laboratory (PERL) engages in forest and tree species research, as part of their plant research brief, partnering with the WSL. The PERL related research can be found in the forest research section.
Swiss Federal Institute of Technology in Zurich (ETH Zurich)

Introductory Overview
Opened in 1854, ETH Zurich is a part of the Swiss Federal Institute of Technology Domain (ETH Domain), itself a part of the Swiss Federal Department of Economic Affairs, Education and Research. One of the continent’s technical academic powerhouses, ETH-Z includes a number of departments in which wood related research is a significant feature of their research agenda.
The principle relevant wood culture research departments are found within the department of Architecture and Civil Engineering, made up of the Department of Civil, Environmental and Geomatic Engineering (D-BAUG) and the Department of Architecture (D-ARCH).
D-BAUG – the Institute of Construction and Infrastructure Management (IBI), the Institute of Structural Engineering (IBK) and the Institute of Building Materials (IfB).
Institute of Structural Engineering
IBK – Chair of Structural Engineering – Timber Structures
IBI – Chair of Sustainable Construction
IfB – Chair of Wood Materials Science

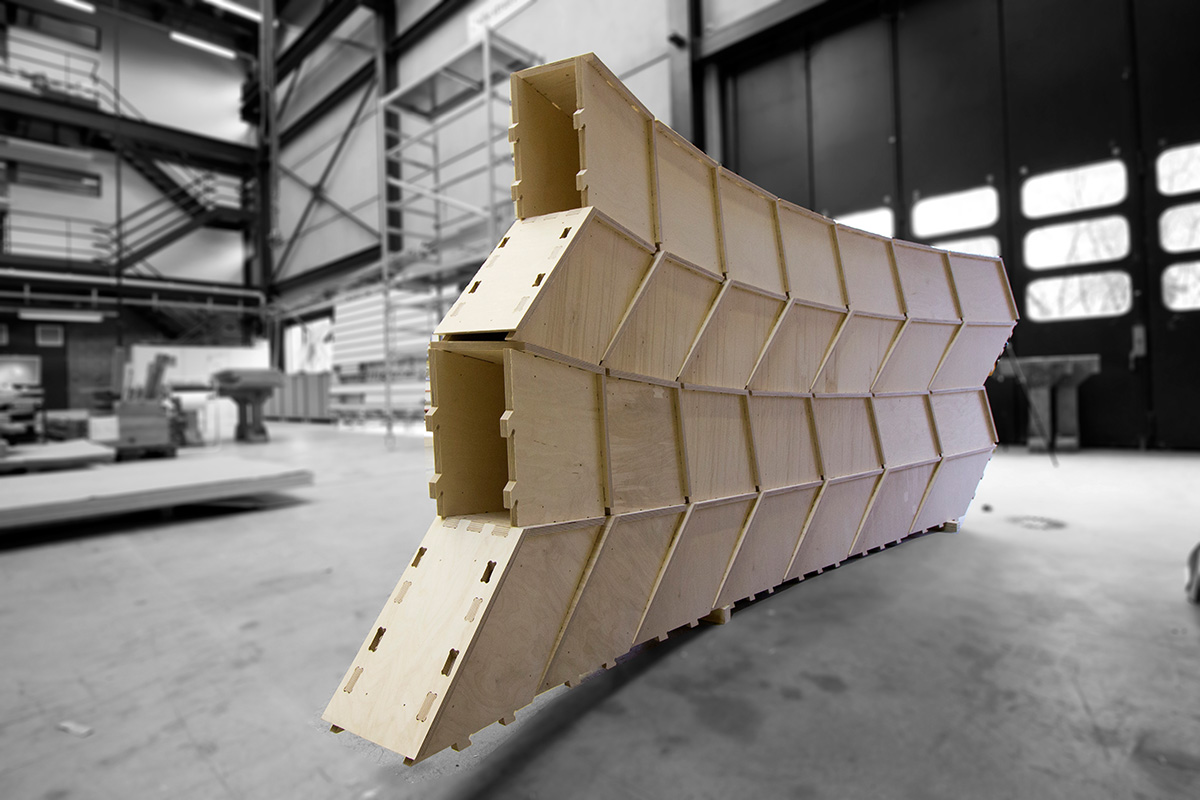
Timber testing at ETH-Z – Photo – Institute of Structural Engineering (Timber Structures
Structural Engineering – Timber Structures
Founded in 2010, the chair is headed by professor Andrea Frangi. The main research fields are split three ways: Structural Timber & Connections, Innovative Timber Structures and Fire Safety Engineering. There are currently 20 researchers, and 18 PhDs have so far been completed over the last decade. The principal research activities of each field are outlined below.
Departmental publications overview can be found here and conference contributions here.

Test setup for three-point bending tests on truss structures made of beech LVL – Photo – Institute of Structural Engineering (Timber Structures)

Truss structure system – Photo – Institute of Structural Engineering (Timber Structures

Structural timber testing – Photo – Institute of Structural Engineering (Timber Structures)
Structural Timber & Connections
With a research agenda of advancing knowledge and calculation models of structural timber and applying experimental and numerical analysis in order to improve design models. Strength, stiffness, along with behaviour of structural timber members and connections are all research concerns. One focus is on developing system and performance-based design of timber structures relevant and applicable to larger and taller timber structures in the context of the 21st century emergence of timber construction and engineering, and another the use of different wood species, connected to changing forests in the context of climate change.
Ongoing research projects
Glue laminated timber made from European beech wood – research providing technical background conditions for the commercial manufacture of glulam beech hardwood, including appropriate production technologies, rules, and processes in quality control of the raw material through to production, alongside providing mechanical properties of beech glulam for the strength classes GL40, GL48, and GL55 to support the design of structural elements.
Related papers:
Glulam columns made of European beech timber: compressive strength and stiffness parallel to the grain, buckling resistance and adaptation of the effective-length method according to Eurocode 5. Ehrhart, T. Steiger, R. Palma, P. et al. Mater Struct 53, 91 (2020). Open access.
European beech (Fagus sylvatica L.) glued laminated timber: lamination strength grading, production and mechanical properties. Ehrhart, T. Steiger, R., Lehmann, M. et al. Eur. J. Wood Prod. 78, pp.971–984 (2020).
Mechanical Characterisation of Densified Hardwood with Regard to Structural Applications. Müller, K., Sonderegger, W, Kläusler. O. Klippel, M. and Escamilla, E, Z., Journal of Renewable Materials, Vol 8, no 9, pp.1091-1109 (2020) Open access.
Queranschlüsse – investigating transverse tensile stresses in relation to a broad span of material and geometric parameters of dimensioning cross connections, which resulted in identifying connection deformation behaviours, along with crack formation, and crack growth. The resulting material parameters and other findings could be given to ensure safe transverse connections design approaches.
Reliability and structural behaviour of timber trusses under consideration of connections – focused on behaviour and reliability of timber structures of high-performance truss structures with connections with dowel-type steel fasteners, using a multi-scale modelling approach with the objective of developing new system-based design concepts for timber structures, applied to realistic and economic timber truss design.
Related paper:
Deformation behaviour of highly loaded elements in tall timber buildings. Wydler, J., Frangi, A. et al. Proceedings of the 2018 World Conference on Timber Engineering here.
Related conference paper:
Trusses made of European Beech LVL. Kobel, P., Steiger, R., Frangi, A. World Conference on Timber Engineering, Vienna, August 2016 here.
Related conference paper by Schilling, S. and Frangi, A. here (in German).
Robustness of tall timber buildings – research on a spectrum of aspects of structural robustness and disproportionate collapse prevention including reliability and numerical modelling to construction. Currently ongoing.
Related paper:
A holistic framework for designing for structural robustness in tall timber buildings. Voulpiotis, K., Kohler, J., Jockwer, R., and Frangi, A. Engineering Structures, Volume 227, 15 January 2021.
Completed projects:
Influence of local strain – differences on the bearing capacity of Glulam – work on developing a probabilistic, parametric model describing glulam mechanical performance, which includes material properties of board sections, distances between knots and finger joints, and influence of local strains of timber, aiming to provide assessments of the different examples across a range of points.
Structural behaviour of glued-laminated timber members subjected to axial compression or combined compression and bending – development of advanced calculation models of timber members structural behaviour in compression to assist design of glued laminated timber members subjected to axial compression or combined compression and bending based on 2nd order analysis.

Photo- Institute of Structural Engineering (Timber Structures)
Research focuses on the development of technically and economically innovative timber structures – particularly timber and composite slab systems – aiming to bring new products, technologies, and construction processes into the practice.
Reliable timber and innovative wood products for structures – development of innovative and reliable plate-type timber structural elements using laminated veneer lumber (LVL) from beech hardwood.
Biaxial timber‐concrete composite slabs made of beech laminated veneer lumber – further development of reliable, efficient, and low carbon Timber-Concrete Composites (TCC) slab systems using beech Laminated Veneer Lumber (LVL) extending the research above. Long term objective of competing and replacing concrete flat slabs, capable of spanning two ways, to integrate with columns rather than walls and strengthens timber elements.
Timber Structures 3.0 – Biaxial load bearing flat slab made of timber – the main focus on punching and the structural behaviour of the slab – development of a column head for a new flat slab system as part of Timbatec AG’s related Timber Structures 3.0 research, with timber slab elements glued together by butt-joint bonding technology and supported by columns.
Related paper: Experimental analysis and structural modelling of the punching behaviour of continuous two-way CLT flat slabs. Muster, M. and Frangi, A. – Engineering Structures, Volume 205, 15 February 2020.
Timber-concrete-composite slabs with self-cambering timber slabs and micro notches – investigation into optimising timber-concrete composite slabs with Brettstapel elements, in order that there is a continuous shear transfer through interlocking micro notches, and the superelevation of timber elements through expansive mortar, removing need for additional support.
Concluded research projects:
Development of post-tensioned timber frame structures (description in German)
Reliable timber and innovative wood products for structures for Plate and Beech-type structural elements made of LVL beech wood
Plate-type structural elements made of LVL beech wood
Beech-type structural elements made of LVL beech wood
Post-tensioned timber structures under wind and earthquake loading
Development of timber-concrete composite slabs made of beech LVL with a notched connection

Fire testing – Photo- Institute of Structural Engineering (Timber Structures)
Timber Structures – has also focused on the safe and economic design of timber structures, including fundamental experimental and numerical analysis, and new calculation design models, developed for a variety of structural elements, including timber slabs, walls and connections. This work has played a central role in the 2015 revision of the country’s fire regulations, which has allowed taller and larger timber structures to be built. Research included a design model for fire resistance of timber connections, glulam and CLT and other bonded elements, and combustible and non-combustible insulation materials.
Reliability based design of timber in fire – examination of Eurocode 5 fire codes design approach in relation to their assigning higher fractile values, comparing timber to other materials.
Natural fire exposure of timber structures – research into timber behaviour in ‘non-standard fires.’ Related to design practice in timber based on standard fire exposures.
CLT rib panels in fire – development of fire design rules for CLT rib panels as these elements are not covered within current fire design standards, including Eurocode 5. Fire resistance behaviour is documented using the Eurocode 5 approach, including geometry, material, combination and use of adhesives, with full scale tests and thermal and mechanical simulations conducted. For other research projects see here.

ETH House of Natural Resources – Photo Timber Structures/IBK/ETH-Z


Timber-concrete composite floors and the post-tensioned timber frame (left) and connection detail of the post-tensioned timber frame (right) – Photos ETHZ/Timber Structures/HoNR

Biaxial timber slab made of hardwood – Photo Timber Structures/IBK/ETH Z
The ETH House of Natural Resources
The Timber Structures chair has been instrumental in ETH-Z’s House of Natural Resources completed in 2015, one of a network of pan-European Living Labs under the EU funded Climate-KIC Building Technologies Accelerator programme. The project involved an extensive timber research programme – underscored by a focus on beech hardwood – very much reflecting the group’s research agenda. Research foci included a post-tensioned timber frame, a hybrid-beech LVL timber-concrete composite slab, a hollow-core timber-concrete composite slab with beech LVL and a pure beech timber CLT bi-axial slab with beech – see further below.
With extensive post-completion structural health monitoring, both technical and from an experiential perspective, a further core objective included is the creation of a long-term comprehensive knowledge base of the behaviour of the timber construction system through the data recorded by monitor sensors and other devices. The House of Natural Resources is currently home to the Laboratory of Hydraulics, Hydrology and Glaciology administration office, and provides ETH-Z with a contemporary timber showcase. Find an office building and research lab overview pdf here.
Structural system research programmes:
Post-tensioned timber frame using hardwood – with post tensioned structures a part of the research agenda since 2010, the House of Natural Resources has been used to further research and highlight a pre-fabricated spruce glulam post-tensioned beam-column timber joint (with ash hardwood joint strengthening) which span 6.5m in three of the building’s bays.
Timber-concrete composite slab using beech wood plates – the research has contributed to the broader beech hardwood agenda, including providing a live structural context for testing prototype beech LVL hybrid timber-concrete slabs.
Research was conducted on the strength, load capacity, and stiffness of the hybrid system, with the two materials joined by 15mm notches rather than steel fasteners, with the concrete acting in compression, and LVL replacing the tensile role usually performed by reinforced concrete. Construction of the hybrid plates followed that of concrete slabs, beginning with beech plates, followed by steel and lateral formwork, the pouring of concrete, and once complete, were subject to dynamic tests and have continued to be monitored.
Biaxial timber slab – along with other R&D beech hardwood related research, Timber Structures developed a beech Biaxial timber slab in 2011 to be used within the House of Natural Resources. This comprised of a CLT slab connected with studs to 10 beech lamellas, with glulam elements added to the support before being placed on the post-tensioned frame reaching 6.5m in length.
A series of tests were undertaken on the completed slab, including lab based dynamic tests to ascertain stiffness, static, and other performance factors.
Dynamic testing was conducted over four phases between January and October 2014 – see in left hand column here, followed by further long-term tests beginning in June 2015, which monitor the structures acceleration behaviour for the remaining lifetime of the building. A monitoring page can be found here.

Images – The Wood Material Science Group/Institute for Building Materials – ETH-Z
Wood Materials Science research group
Within theInstitute of Building Materials Institut fur Baustoffe (IfB) – sits within the Institute for Building Materials and is headed up by Professor Ingo Burgert. The group is currently organised around three core themes: Active and Adaptive Wood Materials, Functional Cellulose Materials and the joint collaborative group WoodTec@EMPA, working in partnership with EMPA, the country’s principal centre for materials, testing, and R&D. Until recently, the group also included the Functional Wood Materials and Characterisation group and the Wood-Inorganic Hybrid Materials group (these are included below to provide links to current research).

Images from the Densified Cellulose Composites project – Courtesy of The Wood Material Science Group/Institute for Building Materials – ETH-Z
Principle research includes wood and wood-based materials, and modification at both the biomimetic and chemical levels, with the objective of broadening the materials’ uses and performance, beginning at the nano-level.
Active and Adaptive Wood Materials
Founded and led by Dr. Guido Panzarasa since 2020, this group focuses on developing advanced materials for use in sustainable smart buildings by enabling wood with novel functionalities. This group currently hosts five PhD students (Ms. Kunkun Tu, Mr. Jianguo Sun, Mr. Christopher Dreimol, Ms. Yong Ding, and Mr. Maximilian Ritter), carrying out different research projects.

Wood Materials for Energy and the Environment (scroll down) – Making wood able to generate and conduct electricity opens the door to the design of building panels with built-in biodegradable electrical components. Enhancing the piezo- and triboelectric properties of wood, without sacrificing its intrinsic sustainability, enables the making of self-powered devices that can convert low-grade mechanical energy into useful electricity. Conductive patterns and structures can be directly written on the surface of wood using the laser-induced graphene approach. Furthermore, obtaining insight on the interaction between light and wood could allow the design of novel sustainable optical and photonic devices.
Programmable Wood Materials (scroll down) – Materials can be programmed to change their properties upon the application of certain stimuli, even without the need of external trigger events. This can be achieved by embedding control systems, such as chemical clocks, in the material structure itself. Enabling wood with chemical time-programmability could result in materials with unprecedented behaviour, and exciting applications, e.g. as smart actuators for soft robotics.
A partnership with the Cellulose and Wood Materials Laboratory at Empa (the Swiss Federal Laboratories for Materials Science and Technology) within the Functional Materials Department – see separate Empa section for in-depth report on the Cellulose and Wood Materials laboratory here.

With cross-disciplinary expertise ranging from wood technology and biochemistry to machine learning, the WoodTec partnership’s research activities encompass the bio-modification of wood, wood coatings development, and the development of machine learning algorithms. For a detailed overview see the Empa section.

Spruce representative volume for calculating hygro-mechanical properties and generic modifications – Image – Complex Systems and Materials Group
Research into a variety of materials and complex systems such as collapsing structures, this recently launched engineering group is led by Dr Falk Wittel.
Research isn’t material specific although it includes wood. Ongoing projects include Mechanical characterization of delignified wood perpendicular to grain see here (scroll down) and within the Research@Commatsys research group work is ongoing on the Wood at multiple scale levels.
Wood on Multiple Scales
The research engages in simulating both bottom up (discrete element methods) and top down (finite element methods) at different scales, to investigate a cross section of moisture dependent material behaviour, wood anatomy, fracture phenomena and mechanics, wood-adhesive interactions, and all the consequences for timber constructions.
Research papers see here and scroll down.

Graphic Credit: ACS Nano

Densified Cellulose Composites project – Courtesy – The Wood Material Science Group/Institute for Building Materials – ETH-Z
Functional Wood Materials and Characterization
Until recently, this group, led by Dr. Tobias Keplinger, was involved in exploringthe chemistry, structure, and mechanics of plant material in order to develop new functional wood-based materials using high tech resolution Raman Spectroscopy Imaging and Atomic Force Microscopy (AFM).
Research projects:
Luminescent and Hydrophobic Wood Films as Optical Lighting Materials – in collaboration with Scion, NZ (by visiting researcher Dr. Qiliang Fu),this project focuses on conversion of natural wood into strong, water-repellent films that glow a variety of colours. A thin 1mm balsa wood film was soaked in a series of solutions of sodium chlorite and sodium hydroxide removing lignin, before the lignin free wood was dipped in a nanoparticle solution comprising cadmium selenide core and zinc sulphide shell, and pressed, dried and coated in a coat of hydrophobic hexadecyltrimethoxysilane to protect it. Under ultraviolet light, the films glow either red or green. With cadmium as part of the chemical make up the luminescent wood is not a pure bio-based material.
Research paper:
Luminescent and Hydrophobic Wood Films as Optical Lighting Materials.Fu, Q.,Tu, K., Keplinger, T., Burgert, I., et al. ACS Nano 2020
Densified Cellulose Composites – nanocellulose research into high performance cellulose-based lightweight composites developed through a two-step delignification and densification process. Spruce softwood was delignified through a process applying hydrogen peroxide and acetic acid, which maintained the wood’s structural directionality, before the cellulose was densified. The result was a more compact bulk cellulose material with a threefold increase in its structural, chemical, and mechanical strength compared to the original spruce. The result is a high-performance ‘bio-inspired’ fibre reinforced material, which can be formed into different shapes.
A video of the project is here and an info-flyer here.
Research paper:
Fabrication and Design of Wood-Based High-Performance Composites.Frey, M., Burgert, I., Keplinger, T. et al JoVE Journal, November 2019, in collaboration with EMPA and Stora Enso.
Delignified wood-epoxy composites – work focused on improving the performance of delignified and densified cellulose, specifically addressing mechanical properties and lack of resistance to water absorption. As a result of the intensive compressing of delignified cellulose fibres the process creates high-volume fibres with interpenetrating phase composites with much improved tensile stiffness and strength, creating the building blocks for potential new bio-based materials.
Research paper:
Delignified Wood–Polymer Interpenetrating Composites Exceeding the Rule of Mixtures. Frey, M., Schneider, L., Masania, K., Keplinger, T., and Burgert, I. – ACS Applied Materials & Interfaces 2019.
Functionalisation of wood and wood-derived cellulose scaffolds by metal organic frameworks – research towards introducing novel metal-organic frameworks (MOF’s), in the form of MOF nano-crystals with wood substrates, to achieve high mechanical properties of the composite advanced material compared to conventional approaches. Through a sodium hydroxide treatment, a nucleation process radically strengthens the MOF-wood composite by up to 130 times, significantly improves tensile and compression mechanical properties, and provides the basis for scalable fabrication of the hybrid MOF/wood derived composite.
Research paper:
Green Synthesis of Hierarchical Metal–Organic Framework/Wood Functional Composites with Superior Mechanical Properties. Tu, K., Burgert, I., Pérez-Ramírez, J., Keplinger, T. et al Advanced Science 06.02.2020.

Schematic representation of the fabrication process to obtain ZIF‐8/wood composites
Wood-Inorganic Hybrid Materials – research group led by Dr. Huizhang Guo, which until recently was a live group focused on developing hybrid renewable biomaterials from controllable chemical synthesis and the composition of cellulose. Research themes included Wood Surface UV protection, UV stable wooden façade, and multi repellent wood surfaces. For a full list of topics see the main group page and scroll down.

Wood Inorganic Hybrid Materials – Image – Wood Inorganic Hybrid Materials/Wood Materials/ETH-Z

Wood and straw – the Beautour Biodiversity Museum, Normandy by GuineePotin Architectes – Photo – GuineePotin

Monte Rosa Hut Andrea Deplazes ETH Z D-ARCH research project 2010 – Photo Wikipedia/HW King

Sustainable Construction – a research and teaching group at ETH-Z since 2006 and is currently led by Prof Dr Guillaume Habert. In contrast to D-BAUGs’ other two research groups, Sustainable Construction isn’t involved in direct timber related research. However, a considerable part of the chair’s work is informed by work directly or indirectly connected to wood related construction and research.
The research group’s ethos is to frame sustainable construction within relevant environmental considerations, such as carbon footprinting, Life Cycle Analysis (LCA), circular economy, material sciences etc. From such starting points research is focused on improving the footprints of buildings and structures, for instance, by developing alternative sustainable materials, and grounding them in sustainability methodologies, eg. LCA, through the full chain of construction. This includes wood derived materials and construction timber in a number of projects.
Sustainable Construction recently launched the CAS ETH Regenerative Materials course, which includes wood within an earth, bio-based, and recycled materials palette. Course overview flyer pdf available here. (CAS – Certificate of Advanced Study)
Research:
Fast-growing bio-based materials as an opportunity for storing carbon in exterior walls. Habert, G., Krause, F., Pittau, F., and Lumia, G. Building and Environment, Vol 129, 01.02.2018, pp.117-129.
The research asked whether sustainable forestry building materials and products impact on biogenic carbon are as effective as assumed, given these are generally considered carbon neutral and are not included in carbon calculations. Five different external wall systems were compared, including a timber frame example and two fast growing biogenic materials (hemp and straw). An LCA model was developed, which integrated timing in calculations. Research showed that the crop-based materials were replenished within a single harvest year, while the timber required several years because of the longer multi-year period growth between harvests.

Pavilion of Reflection, roof structure lowering onto the floating pavilion Summer 2016 – Photo Studio Tom Emerson, ETH-Z
Department of Architecture Departement Arkitektur (D-ARCH)
D-ARCH includes several institutes whose research agendas overlap with wood culture, from the Institute of Technology in Architecture, to cult vernacular and village architect Gian Caminada’s village-architectural modules within the Institute of Architecture and Design.
Unlike D-BAUG’s research chairs, however, these institutes are not directly involved in ongoing wood related research, whether timber structures, wood material science, or digital timber research. However, a number of research projects have highlighted timber – for instance professor Andrea Deplazes’s ETH-Z Monte Rosa mountain hut collaboration in 2009, involving considerable engineered timber research – and individual academics and architects are very much involved in wood-centric and relevant projects.
Annular Further provides an overview of D-AECH’s different institutes’ wood related work.
Institute of Design and Architecture – Institut für Entwurf und Architektur (IEA)
Though markedly different, Gion Caminada and London 6A Studio’s principal Tom Emerson are both committed to an embodied design pedagogy, which connects directly to timber architecture and construction.
Gion Caminada – runs modules connected to rural, vernacular architecture connected to place, provenance, and materials, reflecting his role in Vrin, the small Graubünden mountain village out of which Caminada runs his office as, in effect, the village architect. Many of his projects have been completed using locally sourced community wood stands, working with the local sawmill and other practitioners in the village and immediate community.
Fourth Door Review 8’s Graubünden themed section features pieces on Vrin’s village architecture, and related material.
Tom Emerson – from well-known London 6a studio, Emerson’s D-ARCH courses are physical experiences, emphasising craft, construction, and collaborative experimentation. They include a design and construction project, which generally uses wood. The project below was titled the Pavilion of Reflections and was part of Zurich’s 2016 Manifesta 11 Art Biennale, designed and built as prefabricated sections by Emerson’s student cohort.

Roof structure of the reformed church in Fraumünster (Photo: Jasmin Schäfer, 2017)
Chair of Building Archaeology and Construction History
The institute, led by Prof. Stefan Holzer has a historical focus on architecture and building, covering the Renaissance – early 15th Century to the early 20th century – during which wood and stone were predominant building materials. Taking Switzerland as its starting point, the institute focuses on the various traditions, including the Italian-Mediterranean region, the Franco-Western European construction culture and German-Central European construction technology that converge in the Alpine country. Technological change and the role of equipment are included in the research brief.
Current research projects:
Development of the wide-span wooden roof in Northern and Central Switzerland 1600-1850 – this research into the development of wide-span church roofs in northern and central Switzerland in the early modern period covers over 120 church roof structures, sub-divided into categories, such as traditional Baroque and wide-span Reformed churches, which provide an elaborate range of construction solutions by carpenters needing to resolve diverse structural and technical challenges. Documentation of the major examples are underlined by further detailed recording of connection details, with the aim of creating an archive of material.
Jasmin Schafter is a post doc research student involved in this project. Research papers by Ms Schafer are here.
Professor Holzer has published two volumes of research on 19th century timber structures. Both are in German. There is also a list of articles and papers, many by Professor Holzer, which can be found here.
The King Ludwig Bridge Kempten. Historic landmarks of civil engineering in Germany. 11, ed. from the Federal Chamber of Engineers (Berlin, 2012) – completed in 1852 and spanning the Iller river in Kempten, the bridge is one of the last surviving large wooden Howe System Bridges and illustrates early steps in mathematical structural design.
Static Assessment of Historical Structures, Volume 2: Wooden Structures (Berlin, 2015) Volume 2 – focused on handcrafted historic wooden structures in Central Europe from a preservation and maintenance perspective, including the built examination, identification, dating of historical damage and repairs, and assessing for structures stability.


ITA Institute of Technology in Architecture
The ITA Institute of Technology in Architecture – ITA Institut fur Technologie in Arkitektur – onETH Zurich’s Campus, Hönggerberg is one of the University’s most recent large-scale investments, reflecting the pace of technological change and digital tech’s complete absorption into architecture, engineering, and the building sector.
Again, like other institutes, the ITA does not have any specific timber agenda, but its focus on building and digital building technologies encompasses timber. Albeit in only a very few places, a focus on timber is evident within its seven chairs and four interconnected technology labs. These include the Robotic Fabrication Laboratory, a 3D Printing Lab, and the Adaptive Building Systems Lab. The country’s National Centre of Competence in Research (NCCR) Digital Fabrication is housed within the ITA, and there is considerable crossover and collaboration with Empa and its NEST research programme, which includes a timber construction focus.
The institute is housed in a new building, the Arc_Tech_Lab, built on the roof of a university car park. The lab’s own roof – and ceiling – is a showcase for robotic additive timber design.

The Arc_Tech_Lab’s Sequential Roof and main foyer space – Photo – Andrea Diglas / ITA/Arch_Tec_Lab AG

Future Tree’s reciprocal frame under construction – Photo – Gramazio Kohler Research ETH Z

Photos – (Above) Wikipedia Gramazio Kohler Research ETH Z/Daniel Erne, (below left) Autodesk and (right) Gramazio Kohler Research, ETH Z

Future Tree – Photo – Gramazio Kohler Research ETH Z



The completed DFAB House Photo: Roman Keller, ETH Z

The Stacked Pavilion Project – Photo – Gramazio Kohler Research/ETH Z
Chair of Architecture and Digital Fabrication – Gramazio Kohler Research
Of the seven studios, it is the Architecture and Digital Fabrication, headed up by digital architects, Fabio Gramazio and Matthias Kohler, who have been the most consistently involved with timber as part of the palette of materials explored through the lens of digital fabrication.
Known within the ETH context as Gramazio Kohler Research, a series of timber related research projects extend back over the last decade. These include their most recent Future Tree project, the Arq_Tech_Lab Sequential Roof, the Spatial Timber Assemblies NCCR partnership on the DFAB House, and the long-term Additive Robotic Fabrication of Complex Timber Structures programme running from 2012 through to 2017.
GramazioKohler and their work are featured in Fourth Door Review 8, and in Unstructured 4
Research projects:
Future Tree – a collaborative project exploring a hybrid timber pavilion canopy supported by a concrete column post, both of which have been made by different robotic applications. The canopy is a robotically assembled reciprocal frame. Each of its 380 acetylated timber elements are unique geometric forms, and the canopy’s geometry was determined computationally, with the evaluation of the structure programmed to highlight how automated data exchange between architectural software (Rhino) and the engineer’s structural analysis application can work in an integrated way. Other aspects of this parallel automated design include the geometry of the screws which join the timber elements, and which again have been developed alongside the automated evolution of the reciprocal frame design. The resulting canopy, spanning 107 m2, is supported by the 3D printed, and equally minimal formwork – further expression of the project’s objectives – and has been installed outside the Basler & Hoffmann offices in Esslingen, one of the project partners’ HQ. A promotional video of the construction process is here.
Deep Timber – Reinforcement Learning for Robotic Assembly of Timber Joints (2018-2019) – one of the most recent research projects continues Gramazio Kohler Research’s investigations of automated fabrication in the context of timber materials and structure. Working with Autodesk Robotics Lab, Deep Timber’s research also shifts the focus onto machine learning, specifically Deep Reinforcement Learning, which in contrast to the usual forms of robot learning, enables real-time adaptation and robotic systems to respond to inaccuracies in the fabrication. The research uses joint detailing to illustrate its investigation, providing a context to demonstrate and observe how programming novel machine learning adapts control of robot movements based on its experienced contact forces, enabling it to more accurately insert and position elements into each other, during the construction process.
A part of Empa’s NEST research into the digital fabrication of buildings, the rooms of DFAB House’s upper two floors feature complex 3D geometries on the room’s façade timber structures, which were robotically constructed. A core objective was for the robotic fabrication to be integrated into the computational design so that the design ensured that the multiple robotic assembly, essentially two robots, collaboratively constructed the structure in space – rather than on a flatbed. The 2016-2018 collaborative project, with ETH Zurich’s Robotic Fabrication Laboratory, used multi-robotic fabrication structural and assembly processes enabling a high level of stiffness in the optimised lightweight timber frame to carry lateral loads by the structure itself without requiring further stiffening plates, with the beams cut by CNC saws, before being milled and pre-drilled for holes ready for connection detailing.
Related research papers:
Robotic Fabrication of Bespoke Timber Frame Modules. Thoma, A., Adel, A., Helmreich, M., Wehrle, T., Gramazio, F. and Kohler, M. In Robotic Fabrication in Architecture, Art and Design 2018 edited by Willmann, J., Block, P., Hutter, M., Byrne, K., and Schork, T. 447–58. Springer.
Design of Robotically Fabricated Timber Frame Structures. Arash, A., Thoma, A., Helmreich, M., Gramazio, F. and Kohler, M. in the 38th Annual Conference of the Association for Computer Aided Design in Architecture (ACADIA), Edited by Anzalone, P., Del Signore, M. and Wit, A. J. Mexico City, Mexico, October 18-20, 2018.
The Sequential Roof – Arc_Tech_Lab – sits above the main open concourse of the Arch_Tec_Lab building, covering 2308 m2. It provides a dramatic showcase to the robotic fabrication at the heart of the ITA. Developed by Arch_Tec_Lab AG, Gramazio Kohler Research were at the forefront of the ITA design team, and the design of the rippling deck structure. The roof contains nearly 50,000 (48,624) timber slats, which were robotically assembled to sit within 168 individual truss beams, each up to 15 m long, assembled robotically to form the complex deck geometry spanning the building’s upper storey floors. The design emerged out of integrated digital planning, drawing together design, structural analysis, and the fabrication data generation. As a demonstration project, the building includes various other sustainable features developed within different ETH Zurich departments, including zero emissions technology such as its ‘airbox’ ventilation, which is connected to the campus’s energy grid.
A fact sheet is found here.
Research:
Mastering the Sequential Roof. Computational Methods for Integrating Design, Structural Analysis, and Robotic Fabrication, Apolinarska, A., Bärtschi, R., Furrer, R., Gramazio, F., and Kohler, M. in Advances in Architectural Geometry, ed. Adriaenssens, S., Gramazio, F., Kohler, M. and Menges, A. (2016).
The Sequential Roof. Apolinarska, A., Knauss, M., Gramazio, F. Kohler, M. in Advancing Wood Architecture: A Computational Approach Menges, A. et al Routledge (2016).
Complex Timber Structures from Simple Elements: Computational Design of Novel Bar Structures for Robotic Fabrication and Assembly PhD Apolinarska, Aleksandra Anna(2018).
Earlier research projects:
Additive Robotic Fabrication of Complex Timber Structures, Zurich, 2012-2017
The Stacked Pavilion, Temporary wooden structure Wettswill am Albis, Switzerland, 2009
Superwood, Monte Rosa: Digital Wood Carvings in the Restaurant of the Monte Rosa Alpine Hut, 2008-2009
The Monte Rosa Superwood Project was a part of the CLT research conducted by prof Andrea Deplazes in 2008/9, as chair of Architecture and Construction within the Institute of Architecture and Design (IEA).

Design to Production start-up publicity – Image – from the CAAD page, ETH Z

Early 20th Century Swiss Glulam – Photo Mario Rinke and research team, Chair of Structural Design, ETH Z
ETH Z – Other research groups
It is striking how rare timber related projects, research, and research groups are, with engagement ancillary to wood culture.Chair of Digital Architectonics (CAAD) – within CAAD, the now well-known Zurich software engineering programmers, Design to Production, are a commercial spin-off who emerged out of the department, setting up in 2007. Amongst their specialist work expertise, has been contributing to some of the early and ongoing free-form timber architecture projects.
Chair of Structural Design – are engaged in a historical Glulam in Switzerland project as part of their current research agenda.
Terner & Chopard and the new timber – a historical inquiry into the early application of laminated timber in Switzerland.
Other Universities and academic centres

Installation (above) and detail (below) of tree monitoring tech – Photos – SEGGA/Hepia


Tree lined street in Geneva – Photo HEPIA

Urban tree in Geneva project poster – Hepia
This section overviews other university and academic departments, schools and institutes with a focus on timber research. Some of this research is primarily applied and some technical and vocational departments and courses are also included.
Geneva School of Engineering, Architecture and Landscape
Lucerne University of Applied Sciences and Arts
iBW Higher Technical College, South Eastern Switzerland
Swiss Building School, Aarau
Geneva School of Engineering, Architecture and Landscape
Haute ecole du paysage d’ingeniere et d’archicture de Geneve (HEPIA)
With four core institutes, HEPIA is involved in inter-disciplinary research with joint input from the relevant institutes, primarily these:
Institute Land-Nature-Environment Institut Terre-Nature-Environnement inTNE Institute
Part of Haute ecole du paysage d’ingeniere et d’architecture de Geneve – within a much broader agricultural and environmental management research agenda, spanning soils, water, and other ecological features, inTNE is involved in forest and tree related interdisciplinary projects.
Institute of Landscape, Architecture, Construction and Territory
Institut Paysage, d’Architecture, de la Construction et du Territoire (Institut inPACT) – the principle built environment research institute, research is across landscape and urban environments within a number of groups including the Techniques and Landscapes group (focused on urban tree management, soil, and water in the city and urban contexts) and the Architecture, Environment and Energy group (involved in microclimates and network energy planning in the urban context). In addition, the Landscape Living group undertake related research.
Current collaborative research:
Global Electronic Tree Management Solution (SEGGA) – project to develop a tree monitoring system which enables the prediction of the health of urban trees and ensures their future care (2020 – 2022). inPACT are also involved in this project. A newsletter (in French) explains the project in more detail.
Past collaborative research:
THER-SOL – a project exploring the consequences for soil and urban trees of water run-off and design (2014 – 2016).
VEGE-GEST – initial research steps towards an urban tree management guide for the management of trees in public areas. The research is collaboratively conducted by inPACT’s TEP group and inTNE.
Past inTNE research includes:
Willows and the Rhone (2017-2018) – mapping willow population in the Upper-Rhône French within the biogeographical zone Rhône-Saône-Jura, and Soils and Trees research (SAGE) (2015-2016).

Timber research at the Hochschule Luzern
Lucerne University of Applied Sciences and Arts – Hochschule Luzern (HSLU)
The central Swiss city of Lucerne’s Applied Science and Arts University includes the School of Technology and Architecture – Planung in Architektur – (CLTP). The timber focused research is limited within the overall, and primarily technical, palette of research agendas.
Composite and lightweight construction – the Structural Engineering Competence Centre includes a research focus on composite and lightweight construction with wood, alongside steel, concrete and glass, as one of four focused composite materials.


{kind=link}
Maienfeld education centre – Photo iBW
ibW Higher Technical College, South-eastern Switzerland – Höhere Fachschule Holz Sudostschweiz
With its main campus in Graubünden’s South-eastern capital of Chur and satellite centres in the north of the canton, the iBW Higher Technical College features two departments with a focus on timber: Forestry & Wood, the principal department, and Construction & Architecture which collaborates with F&W on joint Timber Construction courses (links in German).
Forestry & Wood also runs Forestry, and Carpentry and Joinery courses.
There is no research agenda within the technical college although the two department’s do offer post-graduate courses.
The Wald Maienfeld education centre
ibW Bildungszentrum Wald Maienfeld (in German and scroll down) – this is a wood school run on behalf of the Maienfeld Intercantonal Forester School by the iBW, representing 13 cantons. Set in Maienfeld the centre provides full time courses and summer schools are part of its activities. The centre also features a technology centre with a five axis CNC machine and other technologies.

The 2018/2019 Becoming Leman ALICE project workshop – Photo ALICE/Institute Architectur
Swiss Building School, Aarau – Schweizerische Bauschule Aarau
Technical College with full and part-time courses in timber engineering as part of a broader civil engineering, construction, architecture, and design spectrum of courses available.
Workshops, Design & Build/Make and Live Projects
There are a small number of Design & Make workshops run out of the architecture departments across the country:
ETH-Z – D-ARCH
These include modules run by Gion Caminada and London 6A Studio’s principal Tom Emerson, whose D-ARCH courses are physical experiences, emphasising craft, construction, and collaborative experimentation. They include a design and construction project, which generally uses wood.
ii – the Project and Design cluster – includes two laboratories with wood related design studios as part of their emphasis; EAST & ALICE.EAST & ALICE – Both the Laboratory of Elementary Architecture and Types (EAST), and Atelier de la Conception de l’Espace – ALICE (or the Design Studio on the Conception of Space) run live design workshops as part of their student research modules, invariably using timber as a core construction element.
